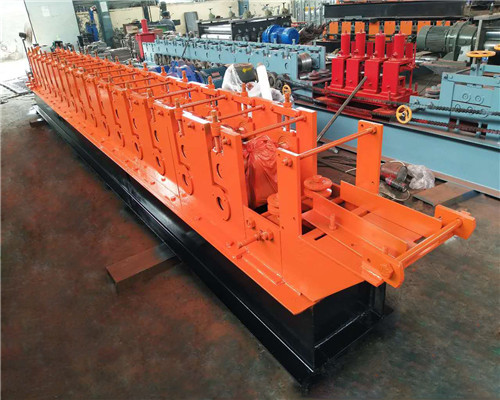
簡要分析校平機(jī)的診斷模塊與伺服系統(tǒng)發(fā)展階段
校平機(jī)伺服系統(tǒng)也叫位置隨動系統(tǒng),它的根本任務(wù)是實現(xiàn)執(zhí)行機(jī)械對位置指令(給定量)的準(zhǔn)確跟蹤,當(dāng)給定量隨機(jī)變化時,系統(tǒng)能使被控制量準(zhǔn)確無誤地跟隨并復(fù)現(xiàn)給定量,是一個位置反饋控制系統(tǒng),主要包括電機(jī)和驅(qū)動器兩部分,廣泛用于航空、航天、及工業(yè)自動化等自動控制。隨著電力電子、控制理論、計算機(jī)術(shù)等技術(shù)的發(fā)展以及電機(jī)制造工藝水平的不斷提高,伺服系統(tǒng)近年來獲得了發(fā)展。
PLC電機(jī)設(shè)備故障遠(yuǎn)程診斷模塊分析:
PLC控制的校平機(jī)電機(jī)在實際運(yùn)行的過程中,運(yùn)行狀態(tài)的數(shù)據(jù)傳輸模塊是該系統(tǒng)軟件構(gòu)成的重要組成部分。PLC的功能要實現(xiàn)動態(tài)的數(shù)據(jù)采集和存儲,并通過上機(jī)位發(fā)給專家數(shù)據(jù)庫系統(tǒng),從而實現(xiàn)很好的數(shù)據(jù)連接和分析。在專家?guī)斓臄?shù)據(jù)分析模塊中,經(jīng)常采用的分析方法包括了神經(jīng)網(wǎng)絡(luò)分析法,時間序列分析法,數(shù)據(jù)庫語言的編寫以C++語言為主,都可以獨(dú)立的生成DLL文件模式,廣泛的讀寫性了PLC控制電機(jī)的靈活性,能夠滿足日益復(fù)雜的使用環(huán)境和要求。可以根據(jù)實際情況來調(diào)整網(wǎng)絡(luò)控制系統(tǒng)內(nèi)部模塊的組合,從而滿足電機(jī)設(shè)備故障診斷的需要。其次,在診斷中心數(shù)據(jù)庫方面,通過對電機(jī)設(shè)備診斷所的數(shù)據(jù)信息及其采集流程的分析,相應(yīng)的數(shù)據(jù)結(jié)構(gòu),并根據(jù)故障的實際情況反饋給電機(jī)設(shè)備制造商,找出其中問題的關(guān)鍵所在。
伺服系統(tǒng)的發(fā)展與伺服電動機(jī)的不同發(fā)展階段相聯(lián)系,由直流電機(jī)構(gòu)成的伺服系統(tǒng)是直流伺服系統(tǒng),由交流電機(jī)構(gòu)成伺服系統(tǒng)是交流伺服系統(tǒng)。伺服電動機(jī)至今經(jīng)歷了三個主要發(fā)展階段:
1、一個發(fā)展階段(20世紀(jì)60年代以前)
步進(jìn)電動機(jī)開環(huán)伺服系統(tǒng)
伺服系統(tǒng)的驅(qū)動電機(jī)為步進(jìn)電動機(jī)或功率步進(jìn)電動機(jī),位置控制為開環(huán)系統(tǒng)。步進(jìn)電機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu),兩相混合式步進(jìn)電機(jī)步距角一般為3.6°、1.8°,五相混合式步進(jìn)電機(jī)步距角一般為0.72°、0.36°。
步進(jìn)電機(jī)存在一些缺點:在低速時易出現(xiàn)低頻振動現(xiàn)象;一般不具有過載能力;步進(jìn)電機(jī)的控制為開環(huán)控制,啟動頻率過高或負(fù)載過大易出現(xiàn)丟步或堵轉(zhuǎn)現(xiàn)象,停止時轉(zhuǎn)速過高易出現(xiàn)過沖現(xiàn)象。
2、二個發(fā)展階段(20世紀(jì)60-70年代)
直流伺服電動機(jī)閉環(huán)伺服系統(tǒng)
由于直流電動機(jī)具有優(yōu)良的調(diào)速性能,很多驅(qū)動裝置采用了直流電動機(jī),伺服系統(tǒng)的位置控制也由開環(huán)系統(tǒng)發(fā)展成為閉環(huán)系統(tǒng)。在數(shù)控機(jī)床的應(yīng)用,永磁式直流電動機(jī)占統(tǒng)治地位,其控制電路簡單,無勵磁損耗,低速性能好。
3、第三個發(fā)展階段(80年代至今)
無刷直流伺服電動機(jī)、交流伺服電動機(jī)伺服系統(tǒng)
由于伺服電機(jī)結(jié)構(gòu)及其材料、控制技術(shù)的突破性進(jìn)展,出現(xiàn)了無刷直流伺服電動機(jī),交流伺服電動機(jī)等種種新型電動機(jī)。交流伺服電機(jī)包括永磁同步電機(jī)和感應(yīng)式異步電機(jī),由永磁同步電機(jī)構(gòu)成的交流伺服系統(tǒng)在技術(shù)上己趨于基本成熟,具備了優(yōu)良的低速性能,并可實現(xiàn)弱磁高速控制,拓寬了系統(tǒng)的調(diào)速范圍,適應(yīng)了伺服驅(qū)動的要求。又因為微電子技術(shù)的發(fā)展,交流伺服系統(tǒng)的控制方式也向微機(jī)控制方向發(fā)展,并由硬件伺服轉(zhuǎn)向軟件伺服或智能化的軟件伺服。利用PWM技術(shù)能夠方便地控制輸出電壓的幅值、相位、頻率,PWM技術(shù)己成為現(xiàn)代交流伺服的基礎(chǔ)性技術(shù)。交流伺服驅(qū)動系統(tǒng)為閉環(huán)控制,內(nèi)部構(gòu)成位置環(huán)和速度環(huán),控制性能。交流伺服電機(jī)具有控制精度較高、運(yùn)行性能好、較強(qiáng)的過載能力等特點。交流伺服系統(tǒng)具有共振功能,并且系統(tǒng)內(nèi)部具有頻率解析機(jī)能,可檢測出機(jī)械的共振點,便于系統(tǒng)調(diào)整。